机器人运动控制的实验与仿真(准备工作)
机器人运动控制实验基础













硬件设备的开机检查
开始使用你的设备
-
连接外部设备
-
PI 版本机器无需搭配 PC、笔记本等设备,连接显示器即可进行应用开发(提示⚠:请使用配套发货的 HDMI 线连接显示器,使用内置系统进行开发)
-
先将 HDMI 线插入显示器的 HDMI 接口
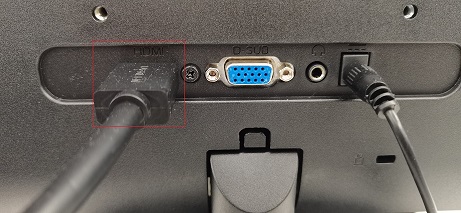
- 再将另一头插入机械臂的 HDMI 接口即可

-
-
系统卡说明
- 32G TF 卡,内置 Ubuntu20.04 系统,已安装myStudio 固件烧录软件,myBlockly 图形化编程软件,且已适配python ROS开发环境
-
可选项目
-
将树莓派连接到本地网络和 Internet 的网络 (以太网) 电缆
-
如果你没有使用带扬声器的 HDMI 显示器,你可能还需要一些声音硬件。音频可以通过扬声器或耳机连接到 AV 插孔来播放 (树莓派 400 上没有)。然而,扬声器必须有自己的放大器,因为树莓派的输出不够强大,无法直接驱动它们
-
-
故障排除
-
确保你使用的是质量好的电源,我们建议使用官方提供电源
-
在关闭机械臂之前,请确保正确关闭了操作系统。
-
这类镜像文件的经典软件就是 Ghost,它同样具备刻录功能,不过它的刻录仅仅是将镜像文件本身保存在光盘上,而通常意义上的刻录软件都可以直接将支持的镜像文件所包含的内容刻录到光盘上。
操作系统的更新升级
受保护的内容
请输入密码以查看此内容
首次使用自查 - 机器关节功能验
注意: 在机械臂启动时,请注意不要让机械臂处于蜷缩或者关节之间触碰的姿态,建议启动时,机械臂姿态应如下图 1 所示,图 2、图 3 均为错误启动姿态:
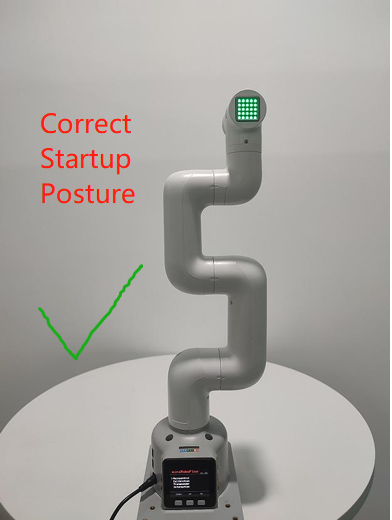 | 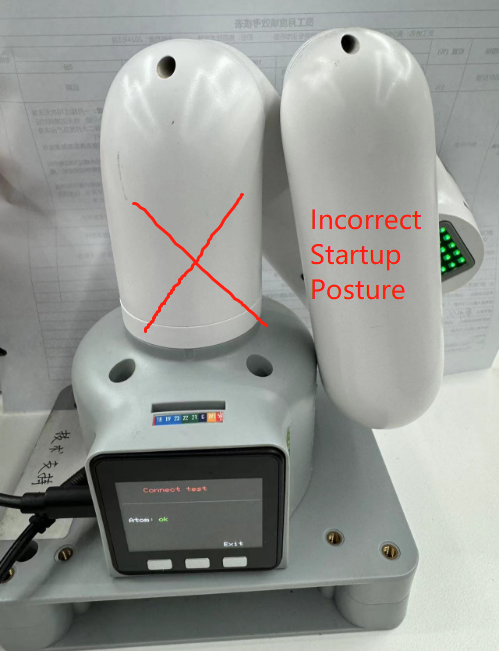 | 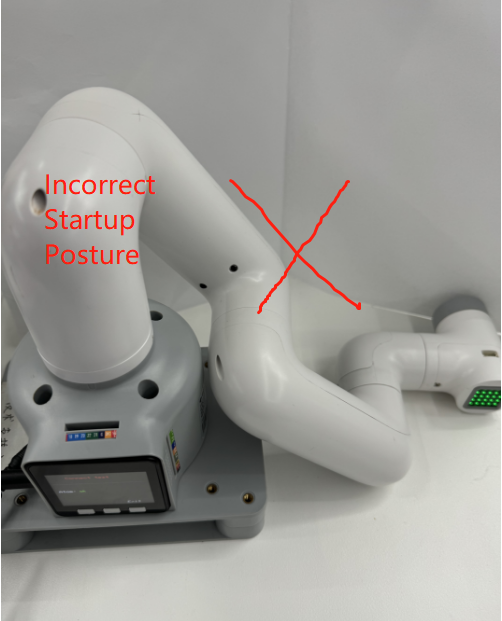 |
|---|---|---|
| 图 1 (正确姿态) | 图 2(错误姿态) | 图 3(错误姿态) |
关节控制方法步骤
1.PI 系列机器的硬件连接:
mycobot280PI 及 mech270PI 系列机械臂需要确保接上电源适配器、建议通过 HDMI 线缆将 280pi 与 HDMI 屏幕连接,并将键盘及鼠标接在 280pi 的 usb 接口。
2.进行软件环境安装与配置
使用 PI 或 JN 版本机器,需要准备一块 HDMI 屏幕,不必自备电脑。在连接 HDMI 屏幕后,可直接进入 280pi 机器自带的系统界面,且由于出厂系统已配置好软件环境,不必自己再安装 python、pymycobot 及 usb 驱动等工具,即可使用机械臂使用案例。
3.USB 通讯示例
请使用 myblockly 或者 python 源码案例进行机械臂关节运动验证。
特别注意使用 usb 串口开放方式需要选择对应串口及波特率,才能使机械臂与电脑正常通讯,从而正常控制机械臂: 以下为对应的机型与串口、波特率的对应信息:
| 机器型号 | 串口号 | 波特率 |
|---|---|---|
| 260 M5 | Win: COM; Linux: /dev/ttyUSB | 115200 |
| 270 M5 | Win: COM; Linux: /dev/ttyUSB | 115200 |
| 280 M5 | Win: COM; Linux: /dev/ttyUSB | 115200 |
| 280 AR | Win: COM; Linux: /dev/ttyUSB | 1000000 |
| 280 PI | /dev/ttyAMA0 | 1000000 |
| 280 JetsonNano | /dev/ttyTHS1 | 115200 |
| 320 M5 | Win: COM; Linux: /dev/ttyUSB | 115200 |
| 320 PI | /dev/ttyAMA0 | 115200 |
| 280 PI | /dev/ttyAMA0 | 1000000 |
| 270 PI | /dev/ttyAMA0 | 1000000 |
3.1 机械臂关节运动 myblockly 源码
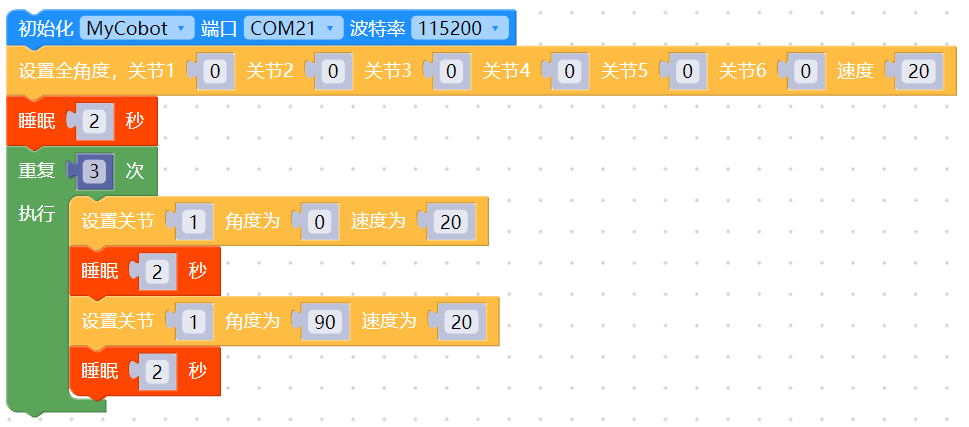
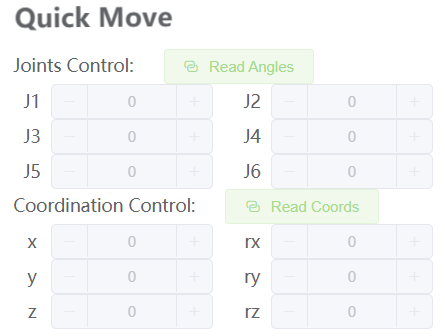
当你看到机械臂的关节 1 在 0-90 度循环运动 3 次效果,说明机械臂关节 1 响应正常,可尝试更改关节 ID 测试其他关节及循序渐进学习使用 gitbook 的其他案例或者利用机械臂做各种有趣的事情!指的一提的是,如果你目前对 myblockly 的代码块开发方式并不熟悉,还有一个相对快捷的关节验证方式是:使用 myblockly 快速移动工具进行简单的关节运动控制,具体用法请参考下图( myblockly 快速移动工具使用 ):

3.2 机械臂关节运动关节 python 源码
#运动效果为机械臂围绕零位姿态,1-6关节逐一运动±20度
import time
from pymycobot import MyCobot280
if __name__ == "__main__":
cobot = MyCobot280('com22',115200)#根据机型选择对应的端口号及波特率
cobot.set_fresh_mode(1)
cobot.send_angles([0, 0, 0, 0, 0, 0], 20)
time.sleep(2)
print("start")
for i in range(1,7):
cobot.send_angle(i, (-30), 20)
time.sleep(2)
cobot.send_angle(i, (30), 20)
time.sleep(2)
cobot.send_angle(i, (0), 20)
time.sleep(2)
当你看到机械臂围绕零位姿态,1-6 关节逐一运动±20 度的运动效果,说明关节 1-6 响应正常,可循序渐进学习使用 gitbook 的其他案例或者利用机械臂做各种有趣的事情!
如果执行案例没有看到相对应的效果,那么请参考下文的常见问题解决方案,另外请注意在联系技术支持人员前确保你已经检查了以下 5 点:
- 机械臂是否能在上电之后正常锁住?如果不能锁住,请参考 FQA 硬件相关问题:“Q:机械臂上电锁不住如何解决?”进行排查
- 如果你的是 M5 系列机械臂,你的电脑与 M5stack 侧面的 usb 口是否通过 type-c 连接着?
- 如果你的是 M5 系列机械臂,你的屏幕 LCD 现在是否停留在停留在 Atom:ok 界面?
- 如果你的是 M5 系列机械臂,LCD 界面显示 Atom:no,请参考“Q:机械臂上电锁不住如何解决?”进行排查
- 运行代码是否有任何报错信息?
下一步
完成本节的开机检查与关节自查后,机械臂已经具备了进入实操的基础条件。下一堂课我们将从“机械臂控制实验测试”出发,进一步体验 myBlockly 和 Python 源码的关节控制方法,观察通信配置、动作下发与运行反馈之间的关系,把“能正常启动”推进到“能稳定、可重复地完成动作控制”。